
You are seeing a free-to-access but limited selection of the activity Altmetric has collected about this research output.
Click here to find out more.
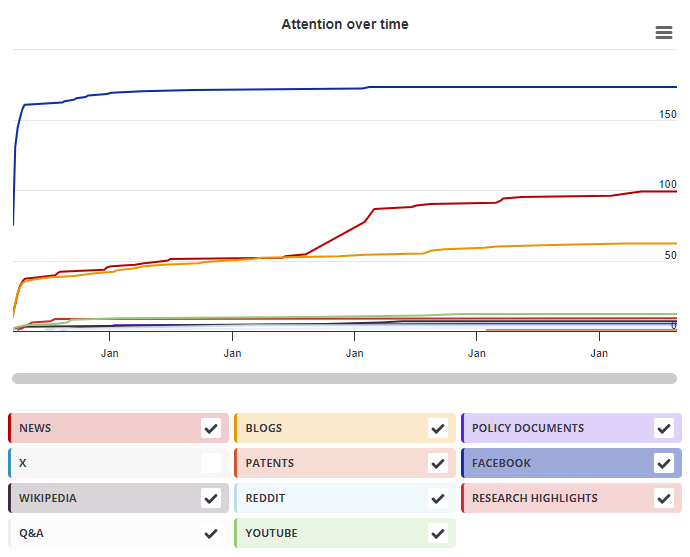
Timeline
| Chapter title |
Geometric Derivation of 6R Linkages with Circular Translation
|
|---|---|
| Chapter number | 7 |
| Book title |
Advances in Robot Kinematics
|
| Published by |
Springer, Cham, January 2014
|
| DOI | 10.1007/978-3-319-06698-1_7 |
| Book ISBNs |
978-3-31-906697-4, 978-3-31-906698-1
|
| Authors |
Chung-Ching Lee, Jacques M. Hervé, Lee, Chung-Ching, Hervé, Jacques M. |